Práce na poli, v lese, na zahradě, ale i na stavbách, obvykle obsahuje určité rutinní práce, které se stanou často stereotypem, jenž nás přestane dříve nebo později bavit. Člověk je ve své podstatě líný a baví ho spíše odpočívat a nebo tvořit a hrát si. Rutinní činnosti nás nebaví a hledáme způsob, jak se jich zbavit. Tak vznikla většina pomůcek, od pěstního klínu, přes kolo až po dnešní moderní automatické pračky, počítače, roboty.
Jelikož pracujeme na zahradě docela často, ale někdy nás ty práce už taky nebaví, přemýšlím, jak si tu práci zjednodušit. Jedním z prvních pomocníků bylo motúčko – motorové túčko – kolečko na baterky, které tahá náklady za nás. Motúčku se věnuji na stránce Motúčko. Motúčko však stále vyžaduje dvě věci – operátora a energii. To znamená, že ho musí někdo obsluhovat a pak ho taky musíte z něčeho nabít. Šlo by to i bez toho? Lenost je hybnou silou vývoje a můžeme říci, že jde. A když budete číst dále a nebo se jen podíváte na obrázky, tak to pochopíte. Tento nápad poskytuji světu a lidem bez nároku na odměnu a je to můj první „otevřený zdroj“ projekt, který bych tímto rád zdokumentoval a poskytnul těm, kdo jej využijí a klidně i zpeněží. V této chvíli je mi to jedno, neboť myšlenka bude proudit a dříve nebo později bude rozvinuta, zdokonalena a stejně se v podobě realizace k lidem dostane.
AGRO-ROBOT, zjednodušeně agrobot je autonomní stroj pro práci na poli. Slovo agrobot bylo původní označení této myšlenky, ale bylo zjištěno, že toto slovo je již používáno více producenty robotických systémů v zemědělství. Aby nedošlo k záměně a kolizi nápadu, vymyslel jsem jiné slovo – BOTENAGR. BOT je konec Ro-Bot-a, En – je Energie a Agr-o – je naše země, půda. Ale toto slovo nezní příliš přívětivě i když zatím nekoliduje s žádným existujícím systémem (21.1.2023). Proto vznikla další varianta pojmenování této zvláštní kombinace technologií. Mohla by použít kombinace slabik ze slov stROj, RO – BOT, ENergie, ZEMě. A výsledek? Co takhle ROZEMBOT ??? Necháme to sednout. Mohl by to být i ROZEMENBOT, ale to už je moc dlouhé. A nebo ZEMENBOT – ZEMědělský ENergetický roBOT, to zní taky docela dobře. Co myslíte? Nebo jenom ZEMĚBOT? Obdoba ZEMĚLODi?
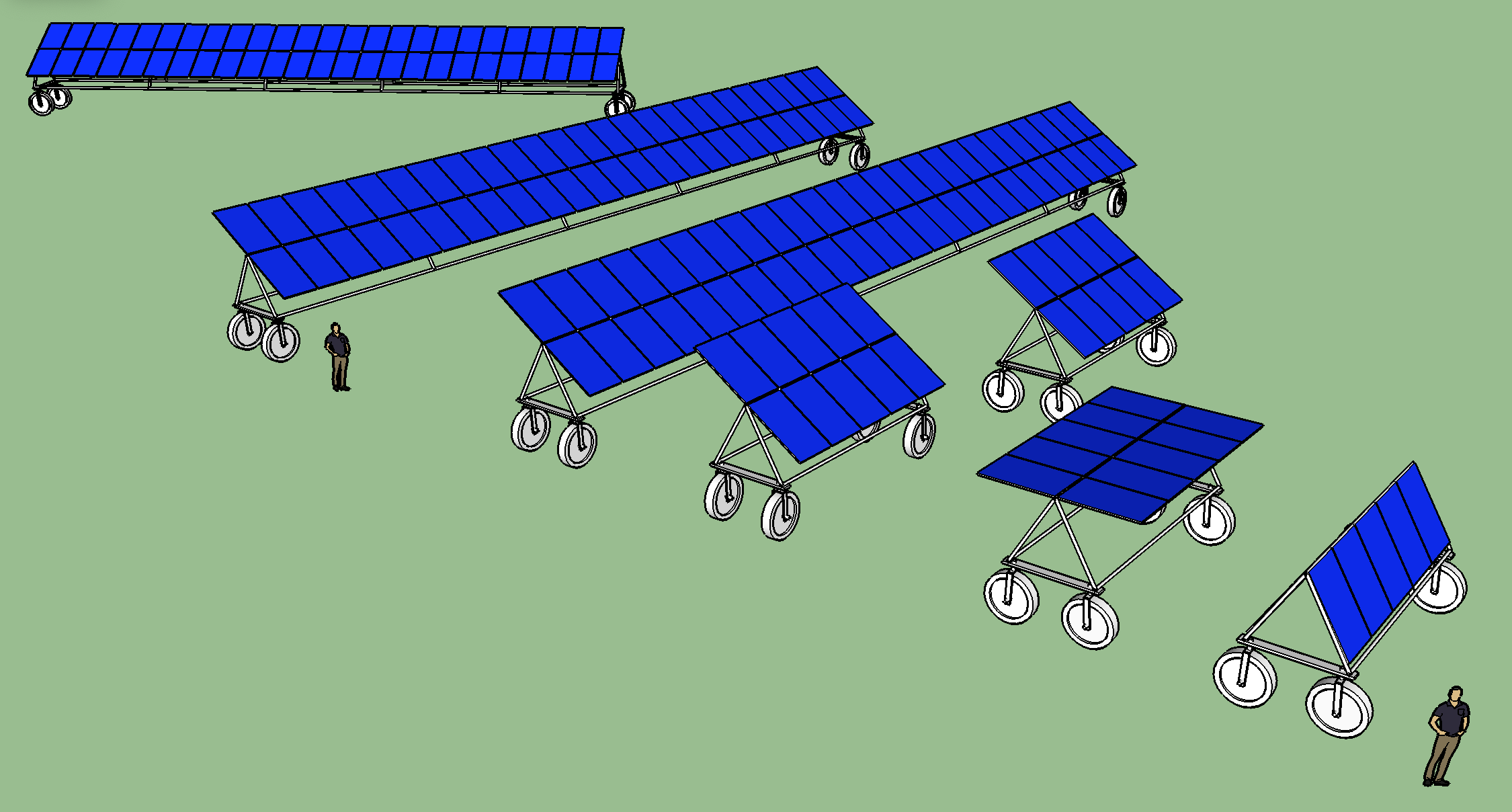
Od svých již existujících variant se tento liší tím, že energii získává přímo ze slunce. Navíc je modulární a lze jej využít i pro energetické účely jako elektrárnu – mobilní fotovoltatická elektrárna s funkcí natáčení panelů.

ROZEMBOT či ZEMENBOT by měl být univerzální robotický systém pro obdělávání půdy šetrným způsobem, bezorební, s nízkým zatížením půdy. Kola pojíždějí mimo prostor, kde se pěstují rostliny a vychází se z myšlenky agrokruhu.
Rozšíření systému agrokruh Ing. Jana Šlinského

Univerzálnost řešení nabídne další využití – manipulátor, jeřáb, 3D obrábění, 3D tisk přímo v terénu. Autonomní napájení zajistí energii kdekoliv i s přebytkem energie a možností akumulace a využití např. pro elektromobilitu, napájení domácnosti apod. Počítá se sezónní použití, ale nejspíš bude využití celoroční. Jelikož bude systém mobilní, nebude vyžadovat žádné stavební povolení, stavební řízení a speciální pozemek. Bude možné jej použít i v lese. Průchodnost terénem bud zajištěna malým rozchodem kol, ale se zachováním stability. Systémem bude možné např. svážet dřevo, ale i na místě jej zpracovat na řezivo. Modul s příslušným adaptérem bude moci řezat dřevo, zavlažovat, tisknout stavby a nebo opravovat cesty.
Inovace
Universal robot everywhere, for everyone, to everything. Clean power, sustainability, reuse, modularity – pro ty co neumí česky, trocha angličtiny, ať to má nadnárodní úroveň, protože tento vynález se dá použít kdekoliv, nejen v ČR. Anglickou verzi vytvořím později.
Univerzální přístup
Robotický systém pro práci v libovolném terénu s autonomním zdrojem energie a řízení
Uvažované zařízení má modulární strukturu, která umožňuje vysokou variabilitu. Základem je samostatně poháněné kolo s přesným řízením polohy ve dvou osách. Základní modul podvozku obsahuje dvě taková kola se spřeženým řízením a další rozšířením na základní modul počítá se čtyřmi koly pro vyšší stabilitu a variabilitu operací. Kola se mohou otáčet v rozsahu vpřed a vzad v jedné ose a cca 100 stupňů v druhé ose, popř. více.
Dva podvozky jsou spojené rámovou konstrukcí, která zajistí tuhost spojení i na vzdálenost desítek metrů. Základní modul má rozměr cca 5 m a lze je řetězit do série za sebe. Na konstrukci budou umístěny solární panely. Základní rozměr panelu 1,6 x 1 m, dva za sebou v rozměru 3,2 x 1 m a na modul lze umístit až 10 ks, tedy cca 3 kWp instalovaného výkonu.
Na modulu budou instalované baterie pro akumulaci, regulace, automatizace. Pro pohyb by měl postačovat výkon řádově do 1 kW na kolo, limitně 250 W na jedno kolo. Optimální řešení je BLDC motor v kole s krokovým řízením.

What we have and what we need
Vzorem systému je agrokruh Jana Šlinského. Tento je však vylepšen o variabilitu pohybu a autonomní napájení.


Agrokruh má pouze jedno / dvě kola poháněné elektromotorem a napájení je zajištěno z pevné sítě. Konstrukce se otáčí kolem pevného bodu, osy rotace. Přemístění na novou pozici tak vyžaduje další manipulaci a modifikaci zařízení, přepojování kabelů a není možné pracovat v libovolném terénu. Napájecí zásuvky se musí instalovat předem a kabely zakopat poměrně hluboko pod zem. Infrastruktura je tímto poměrně komplikovaná. ROZEMBOT/ZEMENBOT toto odstraňuje.
Navržená úprava ROZEMBOT/ZEMENBOT umožňuje libovolný pohyb – kruhový, translační a jejich kombinace jako třeba vlna. Použití různých adaptérů na obdělávání půdy může být kompatibilní se systémem agrokruh. Modulární konstrukce nabízí téměř libovolnou délku konstrukce a díky řízení každého kola bude možné nastavit libovolnou trajektorii v terénu. Orientace bude zajištěna přes GPS a přesnou navigaci zajistí lokální geodetické značky s QR/čárovým kódem a nebo RFID identifikace nebo jiné navigační metody.
Využití a aplikace
Jednoduchá konstrukce, mnoho aplikací, mnoho možností, široké využití.
Univerzální pomocník na pole i do lesa, na zahradu, ale i ulici.
Uveze náklad, obdělá půdu, sklízí i energii
S autonomním řízením může sám vyjet na volnou plochu, sledovat slunce. Při nabitých bateriích pracovat, při vybitých pouze nabíjet.
Při použití různých adaptérů může provádět 3D úkony v terénu – od obdělávání půdy, po tisk libovolně velkých konstrukcí do určité výšky. Spojením více modulů by bylo možné vytvořit prakticky libovolně velké mobilní zařízení s velkou nosností např. mostní jeřáb
Kooperativní robotický systém může vykonávat činnosti jako třeba úklid ulic, sběr odpadků, údržbu zeleně. Moduly mohou být různě velké a různě vybavené – např. s menšími panely a nebo jen s bateriemi a mohou se nabíjet z mateřského modulu.
Pro zpracování dřeva přímo v lese by bylo možné zpracování řeziva a nebo i 3D obrábění. Řízením pohybu ve více osách bude možné provádět prostorové operace jako např. frézování, broušení, vrtání, hoblování, řezání. Tvořivosti se zkrátka meze nekladou.
Byl bych rád, kdyby se našel výrobce alespoň prototypu, na němž bych se mohl podílet a pomoci zprovoznit základní funkcionalitu. V referencích najdete podobné myšlenky již realizované, které dokládají skutečnost, že materializace vizí probíhá neustále, bez ohledu na „majitele“ myšlenky.
Reference
www.agrokruh.sk – Slovenské družstvo aplikující technologii agrokruh Janka Šlinského.
Existuje firma, která nese stejný název a vyvíjí zemědělské roboty: https://www.agrobot.com/
I zde je pojem AGROBOT běžný: https://www.pepperl-fuchs.com/global/en/27566.htm
V České Republice vyvíjí robot pro zemědělství firma ROBOTON.
A zde je robot z Velké Británie, který je nasazen už i na vinicích na Jižní Moravě.